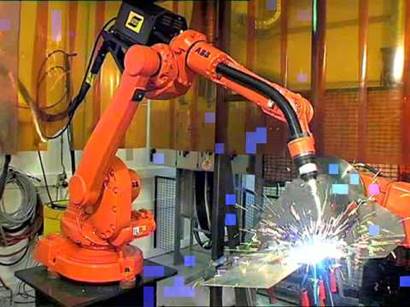
هو عبارة عن ذراع صناعي يقوم بالمهمات التي يصعب على الإنسان القيام بها يتم التحكم فيه من خلال Code يكتب حسب المهمة المصنوع لها





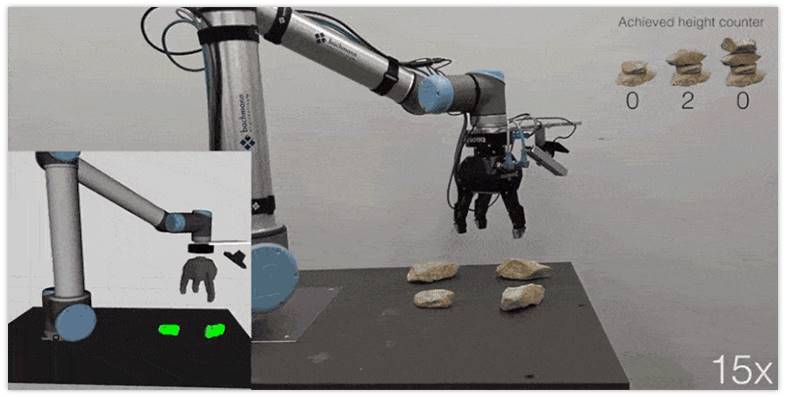
صنع ذراع صناعية مع سير حيث يمر المنتج عليه ويمكن للذراع تحديد مكان المنتج و الإمساك به ووزنه لتحديد إذا كان مطابق للمواصفات أم لا ، كل هذا يتم تلقائيا دون تدخل بشري
المادة الاساسية هى الخشب وذلك لانه اقل تكلفة ويمتاز بالصلابة


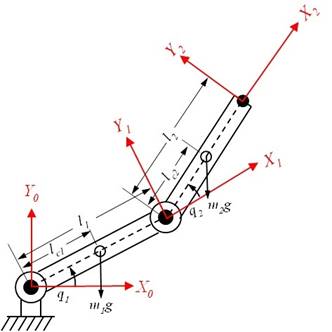
باستخدام ال PIC Microcontroller , encoders و برنامج Matlab يتم التحكم في المواتير باستخدام معادلات كاينماتيكية معروفة بال Forward Kinematics Inverse Kinematics & مع مجسات مثل ال Bending Sensor , Weight Sensor Compass لمساعدة ال ARM في أداء مهمته بدقة وكفاءة عاليتين

مواتير DC ذات عزوم عالية يتم الحكم بها من خلال encoders ، والمستخدمة لاستبدال مواتير ال Stepper ذات العزوم المنخفضة

نظام GUI ليمكن المستخدم من التحكم الكامل في مهمة وحركة ال ARM بالاستعانة ب Image Processing من خلال كاميرا لتحديد مكان المنتج بالنسبة للذراع بدقة عالية